|
Gasleck-Ferndetektion und -ortung mit autonomen mobilen Inspektionsrobotern
Gasleck-Ferndetektion und -ortung mit autonomen mobilen Inspektionsrobotern
Unsichtbares sichtbar machen
Ein Konsortium aus neun Projektplanern1 hat im Rahmen des Förderprogramms Autonomik des Bundesministeriums für Wirtschaft und Technologie den Prototyp eines autonomen mobilen Roboters zur Gaslecksuche in großen Industrieanlagen entwickelt. Ausgestattet mit Video- und optischer Gasfernmesstechnik ist er imstande, Inspektionsaufgaben in Industrieanlagen durchzuführen, ohne in mögliche Gefahrenbereiche direkt einfahren zu müssen – und ohne dass ein Mensch vor Ort anwesend ist.
Oberstes Gebot: Betriebssicherheit in der Prozesstechnik

Betreiber von Industrieanlagen (z.B. Chemieanlagen, Raffinerien, Gasverdichterstationen) legen höchsten Wert auf die Sicherheit ihrer Mitarbeiter und ihrer Produktionsanlagen. Dafür legen sie Prüfzyklen für regelmäßige Inspektionen fest. Hierbei wird die Anlage auf ihren ordnungsgemäßen Zustand von einem Mitarbeiter überprüft, der meist ohne Messtechnik nur anhand seiner Sinneswahrnehmungen und Erfahrung arbeitet.
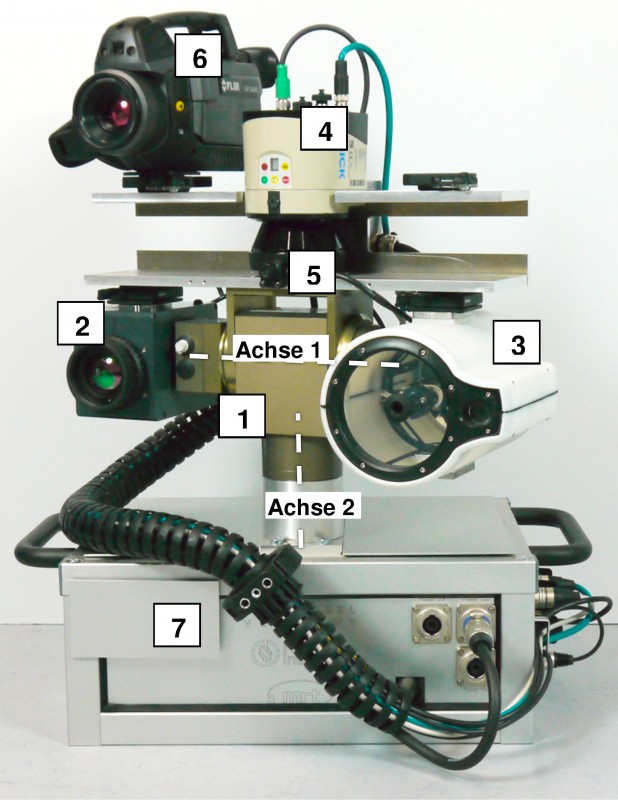
Abb.1 Das Multisensor-Inspektionsmodul. Die Schwenk-Neige-Einheit (1) ist mit einer IR-Thermografiekamera (2), einem aktiven TDLAS-Messgerät (3), einem Laserentfernungsmesser (4), einer Videokamera (5) und der FLIR-GF320-Infrarotkamera zur Visualisierung von Gasen (6) bestückt. Der Computer sowie weitere Elektrik-/Elektronikbaugruppen sind in einem Schaltschrank (7) untergebracht.
Die Frage, wie man eine automatisierte, gefahrenfreie und autonom auf Probleme reagierende Prüf- und Kontrolllösung gestalten kann, beschäftigte auch die Professoren Dr.-Ing. Andreas Kroll und Dr.-Ing. Ludger Schmidt vom Fachbereich Maschinenbau der Kasseler Universität. Deshalb haben sie gemeinsam mit ihren Mitarbeitern und sieben Partnern aus Industrie und Wissenschaft einen Roboter für die Gasleck-Ferndetektion und -ortung in technischen Anlagen entwickelt – den RoboGasInspector. Mit an Bord ist u.a. die Gas-Visualisierungskamera GF-320 von Infrarotkamera-Weltmarktführer FLIR Systems.
Die Entwicklung neuartiger Überwachungsverfahren, die die Möglichkeiten modernster Mess-, Automatisierungs- und Robotertechnik ausschöpfen, verspricht eine Verbesserung der Zuverlässigkeit und der Wirtschaftlichkeit der Inspektionen – bei gleichzeitiger Entlastung des Menschen von monotonen, aufwändigen Tätigkeiten. Hier setzt das Verbundforschungsprojekt unter der Leitung der beiden Professoren der Universität Kassel an.
RoboGasInspector
Gemeinsam mit ihren Konsortialpartnern entwickelten sie ein vom Bundesministerium für Wirtschaft und Technologie (aufgrund eines Beschlusses des Deutschen Bundestages) mit 2,4Mio. Euro gefördertes Projekt: den RoboGasInspector. Ziel dieses Projektes war die Entwicklung und die Erprobung eines innovativen Mensch-Maschine-Systems mit kooperierenden Inspektionsrobotern, die mit Gasfernmesstechnik und lokaler Intelligenz ausgestattetet wurden. Detektion und Ortung von Gaslecks sollten dabei weitgehend autonom von mobilen Robotern bewältigt werden. Die mobilen Roboter sollten dabei zugleich die Auswertung der gemessenen Daten und die Dokumentation der Inspektionen übernehmen.
Bereits bei seiner ersten Präsentation stellte der Roboter seine Funktionsfähigkeit unter Beweis. Selbstständig fuhr er eine Inspektionsstrecke ab, überwand dabei Hindernisse und eine Rampe. An vorgegebenen Inspektionspunkten prüfte er verschiedene Rohrleitungen und fand dabei u.a. ein Methanleck. In den nächsten Monaten konnte dieser Erfolg unter Laborbedingungen auch auf teilweise mehrere Quadratkilometer große Industrieanlagen ausgeweitet werden, in denen Umwelteinflüsse wie Wind und Sonne sowie Störfaktoren durch den Betrieb der Anlagen auftreten können.
Antrieb und Navigation
Der RoboGasInspector besteht aus drei Baugruppen: einer kettengetriebenen Fahrplattform, einem Navigationsmodul und einem Inspektionsmodul, in dem u.a. die Gas-Visualisierungskamera GF-320 von FLIR Systems zum Einsatz kommt. Die Fahrplattform verfügt über einen Elektroantrieb mit handelsüblichen Autobatterien. Das Navigationsmodul besteht aus 2D-Laserscannern (vorne und hinten, besonders wichtig für die Navigation in Innenräumen) sowie einem GPS (zusammen mit den Laserscannern) für die Orientierung unter freiem Himmel. Durch den permanenten Abgleich mit einer digitalen Karte des zu inspizierenden Areals kann der Roboter seine Position jederzeit bestimmen – wobei auf dieser Karte natürlich auch Hindernisse und gesperrte Bereiche (z.B. Ex-Zonen) vermerkt werden können. Dank seiner 2D-Laserscanner meidet der RoboGasInspector aber auch unerwartete Objekte wie geparkte Fahrzeuge, Paletten, Fässer oder Ähnliches.
Inspektionsmodul
Das Inspektionsmodul vereint auf einer Schwenk-Neige-Einheit verschiedene messtechnische Instrumente (Abb.1). Dazu gehört ein Gasfernmessgerät RMLD (Remote Methane Leak Detector), das auf einem aktiven TDLAS-Messgerät (Turnable Diode Absorption Spectoscopy) basiert. Seine Funktionsweise erfüllt es mithilfe eines Infrarotlasers. Trifft dieser Laserstrahl auf eine Oberfläche, wird er reflektiert und seine Restintensität wird gemessen. Bei einem RMLD wird der Laserstrahl allerdings permanent zwischen zwei Wellenlinien verstimmt. Trifft der Laser nun auf Methan, wird eine dieser Wellenlängen unterschiedlich stark absorbiert (abhängig von der Konzentration des Gases), während die zweite Wellenlänge nicht beeinflusst wird. Aus dem Unterschied lässt sich die Gaskonzentration berechnen. Außerdem ist auf dem Inspektionsmodul neben einer herkömmlichen Thermografiekamera auch eine FLIR-GF320-Infrarotkamera zur Visualisierung von Gasen montiert.
Damit der RoboGasInspector selbst nicht zu einem Risiko wird, befindet sich zusätzlich ein In-situ-Gassensor an Bord, der das gesamte System ab 10% UEG (untere Explosionsgrenze) stromlos schaltet, um eine mögliche Gefahr durch eine zündfähige Atmosphäre zu vermeiden.
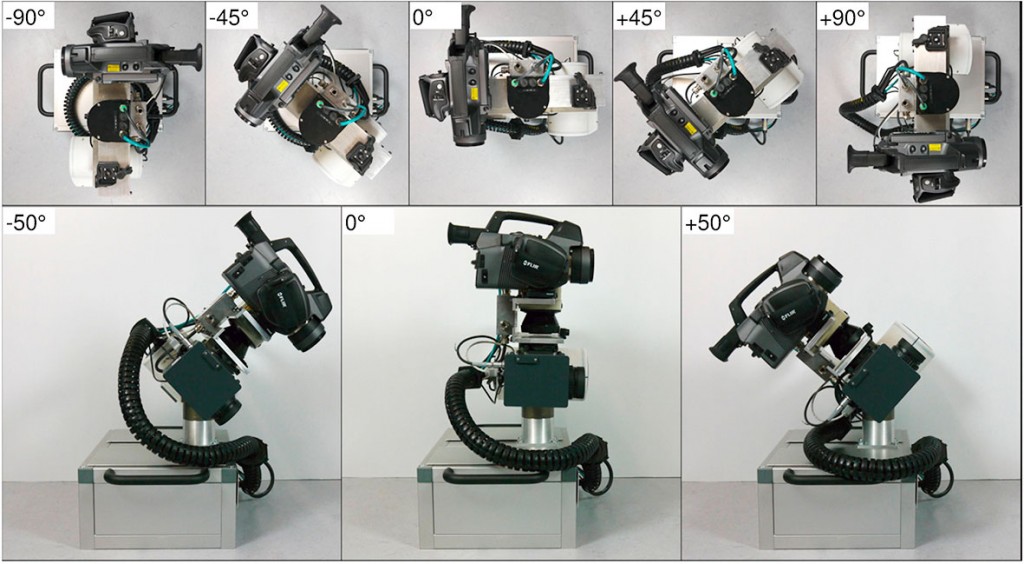
Abb.2 Schwenkbereich (Draufsicht oben) und Neigebereich (Seitenansicht unten) des Sensorsystems.
Autonomer Ablauf der Messungen
Im Roboter selbst findet die Messdatenverarbeitung und Mustererkennung autonom statt. Auch das Abfahren der Inspektionsrouten und die Durchführung der Messungen führt der RoboGasInspector selbst aus. Trotzdem ist er ständig mit der Leitwarte verbunden und kann von dort im Bedarfsfall ferngesteuert werden. Dazu ist u.a. noch eine Videokamera auf dem neig- und schwenkbaren Messmodul montiert (Abb.2).
Fazit und Ausblick
Mittlerweile hat der Systemprototyp in umfangreichen Testreihen seine Einsatzfähigkeit eindrucksvoll unter Beweis gestellt. Vor einem industriellen Einsatz sind allerdings noch weitere Entwicklungsschritte (z.B. in Ex-Schutz, Software-Entwicklung etc.) notwendig, zumal vor einem kommerziellen Einsatz natürlich auch rechtliche Fragen geklärt werden müssten. Sicher ist aber, dass ein autonomer, mobiler Gasdetektions- und Leckortungsroboter bereits heute möglich ist und einen deutlichen Sicherheitszuwachs ermöglichen kann. FLIR Systems ist stolz darauf, mit seinen Produkten an diesem spannenden Projekt beteiligt zu sein, und wünscht dem Team der Universität Kassel viel Erfolg bei der weiteren Entwicklung.
1Folgende Konsortialpartner sind an dem Projekt „Inspektionsroboter“ beteiligt: Universität Kassel, ADLARES GmbH, BAM Bundesanstalt für Materialforschung und –prüfung, Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie, Hermann Sewerin GmbH, PCK Raffinerie GmbH Schwedt/Oder, Telerob Gesellschaft für Fernhantierungstechnik mbH, Universität Kassel und Gascade Gastransport GmbH.
Stichwörter:
Prozesstechnik, Multisensor-Inspektionsmodul, automatisiert, Mess-, Automatisierungs- und Robotertechnik, Schwenk-Neige-Einheit, Messdatenverarbeitung,
|