
|
Ex-Schutz
 >
Gasmessung und Gasquellenlokalisierung mit einer Mikrodrohne
>
Gasmessung und Gasquellenlokalisierung mit einer Mikrodrohne
Gasmessung und Gasquellenlokalisierung mit einer MikrodrohneFliegende AufspürerMikrodrohnen, auch bezeichnet als unbemannte Luftfahrzeuge (engl. unmanned aerial vehicles, UAV), halten als moderne Plattform für Überwachungstechnik Einzug in diverse Anwendungsgebiete. Am weitesten verbreitet ist der Einsatz von Foto- und Videotechnik zur Beobachtung und Dokumentation unterschiedlichster Vorgänge und Situationen aus dem Luftraum. Die technische Entwicklung auf dem Gebiet der Messtechnik und Sensorik ermöglicht aber auch die Integration von Nutzlasten zur Erfassung anderer Messgrößen, wie z.B. der Messung von Gaskonzentrationen. Luftbasierte Gasmessung 
Die Bundesanstalt für Materialforschung und -prüfung (BAM) hat in Kooperation mit der Firma AirRobot GmbH & Co. KG ein ferngesteuert fliegendes Gasmesssystem auf der Basis einer Mikrodrohne entwickelt, welches in der Lage ist, in unterschiedlichsten Szenarien der Gasfreisetzung, wie z.B. Abgas aus Schornstein, Rauchgas bei Brand, Emission bei Chemie- bzw. Gefahrgutunfall oder auch terroristischer Giftgasanschlag, zu operieren [1]. Zielsetzung ist die Gasmessung in unmittelbarer Nähe der Emission unter Vermeidung einer Personengefährdung, d.h. mittels einer mobilen Plattform. Eine noch größere technische Herausforderung stellt die luftraumbasierte Suche und Lokalisierung von Gasquellen dar, mit der sich die Doktorarbeit von Patrick P. Neumann befasst [2]. Die Gasquellenlokalisierung hat hohe Bedeutung im Bereich der Leckagedetektion, Deponieüberwachung, Terrorbekämpfung etc. und ist in vielen Bereichen ein ungelöstes Problem. Die meisten Verfahren der mobilen Roboternavigation zur Lokalisierung von Gefahrstoffquellen basieren auf dem Suchverhalten von Insekten und anderen Tieren, die ihren Geruchsinn benutzen, um z.B. Nahrung zu erkennen und zu lokalisieren oder einen Partner zu suchen. In der Literatur [3] findet man diese Verfahren unter den Stichworten Duftquellenlokalisierung (odor source localization) oder Verfolgung von Schadstofffahnen (plume-tracking). Deren Adaption zur Routenplanung ist zuvor nur auf bodengebundenen Roboterplattformen, Unterwasserfahrzeugen und einfachen Luftschiffen implementiert und evaluiert worden.

Abb.1 Quadrokopter AR100-B mit integrierter Gasmesseinheit

Abb.2 Aufbau und Durchführung eines Experiments zur Erstellung von Gasverteilungskarten. Die Darstellung zeigt die anhand von GPS-Koordinaten vorprogrammierte Flugtrajektorie mit den Messpositionen (rote Punkte), der Startposition (roter Stern) und der vorherrschenden Windrichtung (roter Pfeil).
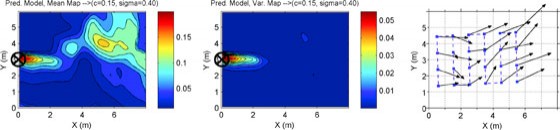
Abb.3 Berechnete Gasverteilungskarten des Mittelwerts (links) und der Varianz (rechts) der Methankonzentration. Das Diagramm rechts zeigt die korrespondierende Karte des Windfelds. Die Methanquelle befindet sich an der Position (0; 3) m. Die Startposition der Drohne befindet sich an der Position (5,5; 1,5) m. Die Methankonzentration ist in Volumenprozent dargestellt.
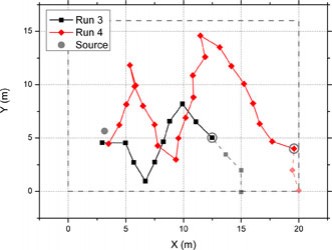
Abb.4 Trajektorien von zwei Versuchen zur Gasquellenlokalisierung unter Verwendung des „zigzag/dung beetle“-Algorithmus. Als Versuchsgas wurde Methan verwendet. Die Versuchsfläche ist durch die grau gepunktete Linie markiert. Die Quellposition wird durch den grauen Punkt dargestellt. Die grau umkreisten Messpunkte zeigen die jeweils erste Messung über dem im Algorithmus angesetzten Konzentrationslimit.
Quadrokopter als Plattform Der Quadrokopter AR100-B von Airrobot ist Basis für die mobile Gasmessung (Abb. 1). Die Integration einer Gasmesseinheit in diese Plattform unterliegt schwierigen Anforderungen hinsichtlich der Eigenschaften Gewicht, Dimension, Energiebedarf, Einfluss der Rotoren auf die Gasmessung und Messgeschwindigkeit. Die Umsetzung erfolgte auf Grundlage des Gasmessgeräts X-am 5600 (Dräger Safety AG & Co. KGaA), das eigentlich als Handmessgerät im Rahmen der persönlichen Schutzausrüstung konzipiert ist und für die luftbasierte Anwendung adaptiert wurde. Das Gerät verfügt über ein geringes Gewicht und eine kompakte Bauform. Das modulare Konzept erlaubt den Einsatz und kurzfristigen Austausch von vier Gassensoren und somit die Anpassung des Geräts an die spezifischen Einsatzbedingungen. Es stehen elektrochemische, katalytische und Infrarotsensoren zum Einsatz zur Verfügung, die die Messung einer Vielzahl brennbarer Gase und Dämpfe sowie verschiedener u.a. toxischer Gase, z.B. O2, CO, H2S, NH3, CO2, SO2, PH3, HCN, NO2, Cl2, CH4 erlauben. Durch die Kombination der genannten Hauptkomponenten und eine geschickte konstruktive und datentechnische Integration wurde es möglich, die auf ca. 200g limitierte Nutzlast des AR100-B in etwa einzuhalten und die exzellenten Flugeigenschaften aufrechtzuerhalten. Bestimmung des Windvektors Für die Lokalisierung von Schadstoffquellen und -leckagen ist neben der Gasmessung die Kenntnis der vorherrschenden Windgeschwindigkeit und -richtung, also des Windvektors, unbedingt notwendig. Die Beschränkung der Nutzlast des Quadrokopters erlaubt es nicht, eine dafür geeignete Sensorik (z.B. ein Anemometer) mitzuführen. Deshalb wurde ein Verfahren entwickelt, anhand der inertialen Mess- und Steuereinheit (inertial measurement unit, IMU) der Drohne den Windvektor zu bestimmen. Dabei werden die verschiedenen Sensordaten der Onboard-Sensoren (Beschleunigungssensoren, Magnetfeldsensoren, Gyroskope und GPS) genutzt, um die verschiedenen Parameter des Winddreiecks zu bestimmen [4]. Das Winddreieck dient der Navigation und beschreibt das Verhältnis zwischen Flugvektor, Übergrundvektor und Windvektor. Verfahren zur Gasquellenlokalisierung Zur Gasquellenlokalisierung können zwei grundsätzliche Verfahren angewandt werden: zum einen Gasverteilungskarten, deren Orte mit maximaler Gaskonzentration bzw. mit maximaler Messwertvarianz Gasquellen indizieren, und zum anderen die direkte Verfolgung einer Gasfahne bis hin zur Quellposition anhand geeigneter Algorithmen unter Verwendung der Gaskonzentrations- und Windvektordaten. Im Folgenden werden die Ergebnisse jedes dieser Verfahren kurz vorgestellt und erläutert. Die Berechnung und Visualisierung von Gasverteilungskarten erfolgt hier unter Verwendung des DM+V/W-Algorithmus von Reggente und Lilienthal [5]. Als Input für diesen Algorithmus dient der Datensatz einer Messkampagne mit der Form D = {xi, ri, vi} mit 1 < i < n bestehend aus Gaskonzentrationen ri und Windvektoren vi gemessen an der Position xi. Das Ergebnis liefert ein Gittermodell, das für jede Position den Mittelwert und die Varianz der Gaskonzentration in einem Konfidenzintervall darstellt. Abbildung 2 zeigt die Durchführung und Abbildung 3 die Gasverteilungskarten sowie die Karte des Windfelds für ein Experiment mit einer Methanquelle, das auf dem Testgelände für technische Sicherheit der BAM (BAM TTS) durchgeführt wurde. Zur Gasfahnenverfolgung wurden drei vielversprechende Algorithmen aus der Tierwelt abgeleitet und an die Einsatzbedingungen der Mikrodrohne angepasst: der „surge cast“-Algorithmus (eine Variante des „silkworm moth“-Algorithmus), der „zigzag/dung beetle“-Algorithmus und der neu entwickelte „pseudo gradient-based“-Algorithmus. Erste Experimente wurden erfolgreich absolviert [6]. So zeigt Abbildung 4 zwei erfolgreiche Testflüge unter Verwendung des „zigzag/dung beetle“-Algorithmus mit Verfolgung einer Gasfahne bis auf ca. 1m Annäherung an die Quellposition. Möglichkeiten und Grenzen Die Kombination von mobiler Plattform, leichter und robuster Gassensorik, Windvektorbestimmung und Algorithmen zur Sensordatenfusion eröffnet innovative Möglichkeiten in Anwendungsgebieten mit Gasfreisetzung. Der Einsatz in Brand- oder Unfallszenarien zur Einschätzung der Lage ist kurzfristig realisierbar und kann wichtige Informationen liefern, ohne dabei Personen in eine gefährliche Situation zu bringen. Etwas komplizierter verhält es sich, wenn es um möglichst exakte Messungen bei geringfügigen Gasemissionen geht, wie beispielsweise bei der Lokalisierung von Leckagen. Erste erfolgreiche Experimente wurden durchgeführt. Dennoch bestehen derzeit noch deutliche Herausforderungen an die Technik. So sind längere Flugzeiten als die derzeit üblichen ca. 30min wünschenswert, außerdem ist eine möglichst schnelle und exakte Sensorik wichtig, um gute Ergebnisse in einem dynamischen Szenario erzielen zu können. Ein entscheidender dabei zu berücksichtigender Aspekt ist die Verwirbelung und Durchmischung von Gasemission mit der Umgebungsluft durch die Rotoren. Erste Lösungsansätze [1] bedürfen der experimentellen Validierung und Optimierung. Literatur
M. Bartholmai, P. P. Neumann, tm - Technisches Messen, 78, 10, 470?–?478 (2011) Foto: Fotolia.com / grimplet, istockphoto.com | wagnerm25 |
C&M 4 / 2013
Das komplette Heft zum kostenlosen Download finden Sie hier: zum Download Die Autoren:Weitere Artikel online lesen

NewsAhlborn GmbH: Hochgenaue Temperaturmessung mit digitalen Fühlern
© Ahlborn Mess- und Regelungstechnik GmbH |
Suche:






